
James est un robot PR2, construit par l’US Robotics du Willow Garage et il s’est rendu en Allemagne dans le cadre du programme bêta PR2, dans un effort de vulgarisation des robots personnels. À l’Université technique de Munich (TUM), James a été présenté à Rosie, un robot à deux bras avec une silhouette tout en courbes et quatre yeux.
Leur préparation est exécutée en temps réel, rien n’est préenregistré, les robots doivent s’adapter constamment à leur environnement pour accomplir la tâche.
Tous deux exécutaient un ROS pour Robot Operating System (un système d’exploitation sous licence open source permettant de contrôler un robot), utilisent des scanners laser de Hokuyo et des capteurs 3DKinect, avec des bases omnidirectionnelles. James et Rosie ont donc tout naturellement (!??) décidé de préparer un Weisswurst Frühstück, un petit-déjeuner de saucisses bavaroises.
Il s’agissait d’une manifestation préparée par des chercheurs de CoTeSys (Cognition pour les systèmes techniques), un groupe high-tech basé à Munich.
C’est ainsi que les chercheurs résument l’expérience :
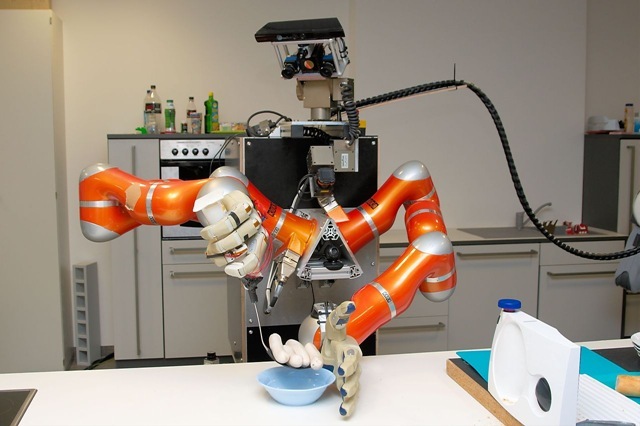
TUM-Rosie recueille les saucisses, les mets dans la casserole d’eau bouillante, en attendant qu’elles soient cuites et, enfin, il récupère les saucisses , les sorts de la casserole, pour les poser dans un bol. Le robot PR2 TUM-James quant à lui tranchait la baguette de pain en utilisant une trancheuse électrique ordinaire et pour finir par servir les saucisses et le pain avec la classe que les roboticiens apprécient.
TUM-James fait appel à des progrès récents dans le domaine du temps réel, en utilisant un capteur Kinect, pour la détection de la trancheuse électrique et la baguette. Pour le service, il utilise les capacités haptiques du PR2, afin de saisir et manipuler le plat.
TUM-Rosie utilise également la Kinect et la perception algorithmique du module COP (perception cognitive) afin de positionner l’écumoire et l’utiliser comme un nouvel outil. En outre, il intègre les modèles 3D pour le pot et les bols poser arbitrairement sur la table, afin d’être en mesure de les localiser. Enfin, il utilise les capteurs pour résoudre des inexactitudes de mesure de profondeur, grâce à la détection par le contact avec les objets.
Le couple s’était déjà rencontré précédemment, pour préparer des crêpes, plus précisément des pancakes :
La description de cette rencontre sur le site de l’Université technique de Munich :Robotic Roommates Shopping for and Preparing Bavarian Breakfast.
L’orange aurais pus être une étude de design de la marque Kitchenaid, tellement c’est leur style oO
Sinon, bravo au deux robots pour leur taff (ou ballet :)) effectuer, il est tout simplement superbe.
PS: J’espere que GuruMed, gardera la même mise en page (PC ou Smartphone).
Enfin, bonne Continuation au blog qui est géniale.
Merci pour ces encouragements cher(e) AS… 😉