
Un petit sac rempli de café moulu pourrait être la nouvelle main sans doigt de nombreux robots. Ce nouveau type de pince est capable de saisir toutes sortes d’objets avec aisance. Jusqu’à maintenant, les ingénieurs en robotique essayaient de reproduire le modèle de la main humaine avec ces quatre doigts et son pouce préhenseur. Des difficultés apparaissent pour mettre au point un agrippeur suffisamment polyvalent pour saisir une variété d’objets et s’adapter aux plus fragiles.
Une équipe de chercheurs a donc contourné la traditionnelle main de l’homme et ses doigts pour créer une pince souple à l’aide d’un ballon en latex remplis de marc de café.
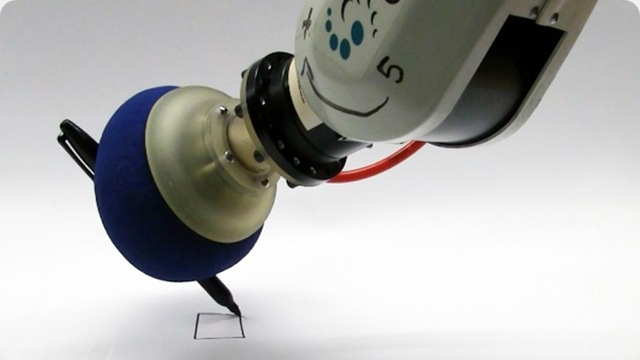
Appelé pince ou agrippeur universelle , elle est rattachée à un bras robotisé et est constitué d’un ballon rempli de café se déformant autour de l’objet à saisir, avant qu’une pompe aspire l’air du ballon pour solidifier l’emprise sur l’objet. Lorsque le vide est relâché, le ballon redevient mou permettant de relâcher l’objet.
Plusieurs matériaux ayant les mêmes particularités, comme le riz, des grains de couscous ou du sable ont été testés avant d’adopter le café moulu qui est le plus léger.

Les chercheurs ont obtenue de très bons résultats dans la saisi d’objets courant, comme l’œuf ou une pièce de monnaie qui restait très difficile a réalisé pour les traditionnelles mains robotisées. De plus, grâce à sa polyvalence, il pourrait s’adapter à la voler sur différents articles même inconnu de la machine.
La création de cette pince est une collaboration entre l’Université de Chicago, l’Université Cornell et iRobot Corporation avec les fonds de la DARPA. 